It is generally accepted within the seismic acquisition industry that seabed seismic receivers deliver superior seismic data and consequently better seismically derived subsurface images. However, seabed receiver or ocean bottom node surveys (OBN) are currently not as widely used as towed streamer seismic, primarily because of the higher acquisition costs.
In general, seabed surveys are only considered for the most challenging geophysical objectives such as reservoir management projects and the imaging of complex geological objectives where high repeatability and full azimuth measurements are required.

Deployment of ocean bottom nodes from surface vessel by ROVs. Images courtesy of Magseis Fairfield.
A modern quality OBN design can deliver many times the data of a streamer survey. It may also offer superior azimuthal distribution, and in some cases can even be more cost effective through higher productivity enabled by simultaneous source acquisition and refinements in node handling systems.
Automation, Step by Step
In recent years, there has been significant engineering effort around more efficient seismic node deployment and retrieval to address this cost differential, and thus open seabed node acquisition techniques to a wider range of exploration and development challenges.
Initially OBNs were exclusively deployed by remote operated vehicles (ROVs). These submersible machines have robotic arms, known as manipulators, a camera for subsea visual analysis, electrical drivers for motion control and onboard batteries or external umbilical cables for communication and power delivery. ROVs for exploration were introduced during the 1970s and represented a significant technology upgrade as they were designed to operate at extreme pressures and low temperature conditions. These systems remain in use in marine environments but can be costly for node deployment.
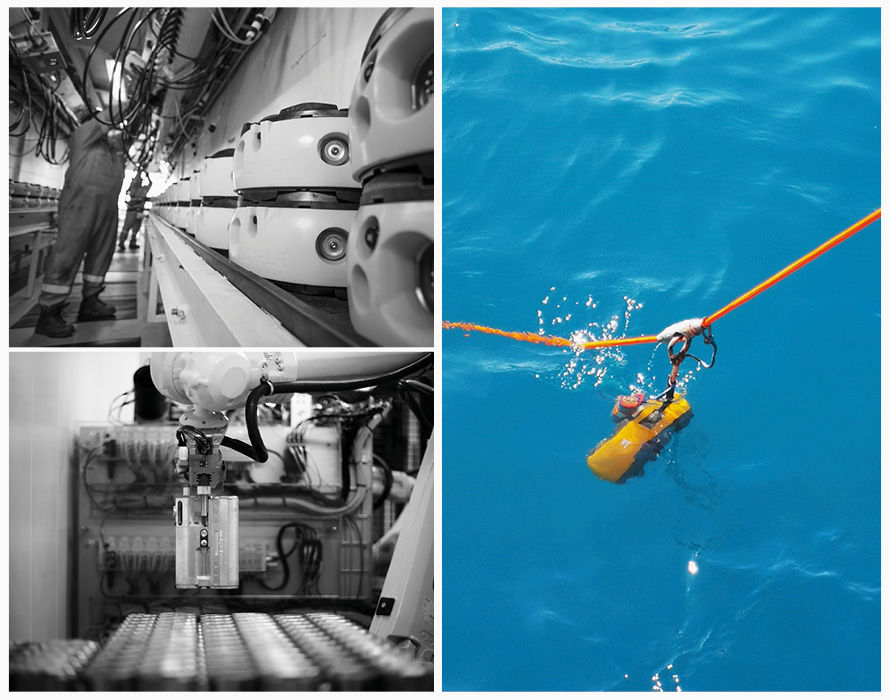
a) Node being deployed on cable (rope); b) nodes on a conveyer pre-deployment; c) robotic node handling system. Images courtesy of Magseis Fairfield.
One of the most developed systems currently in use for cost-effective OBN deployment and retrieval is the nodes-on-a-rope (NOAR) deployment system. This method is becoming widely accepted and can allow placement down to 1,500m and theoretical deployment and recovery speeds of up to 5 knots with nodes at 25m spacing, which is significantly faster than conventional ROV deployment, where the nodes are placed individually on the seabed. However, in real-world situations, NOAR deployment efficiencies are often reduced by seabed infrastructure such as pipelines, cables, and other systems. In these instances, the rope must be terminated and restarted rather than crossing the obstructions which can slow the operation. Node positioning requirements can also have a major impact on deployment efficiency, with many oil companies imposing tight positioning specifications for the nodes that require precision placement that can only be achieved at slower speeds. In NOAR operations, up to 10,000 nodes can be carried on a single vessel, and automated robotic node handling, battery-change and data-docking and downloading systems are now highly developed.
A Swarm of Seismic Drones
If it becomes possible to drive OBN acquisition costs down even further, it could open higher quality subsurface imaging to exploration activities and not just for particularly challenging imaging objectives or 4D monitoring of producing assets. These efforts include evaluation and development of autonomous underwater vehicles (AUVs) with fully integrated seismic nodes, which can navigate independently to and from the deployment location. These new systems would use a modified surface vessel or ‘vessel of convenience’ as the ‘mother ship’ that would both deploy and retrieve the AUVs as well as monitor operations.
There are several companies currently engaged in this endeavour. Most of them envisage a system which is very highly automated with the seabed nodes having the capability of navigating to a predetermined location on the seabed, coupling to the seafloor and then moving on to a second (or several) locations thereafter, whilst the source vessel shoots overhead. Envisage a ‘swarm’ of these robotic nodes operating independently, but in concert with one another. It is envisioned that the introduction of robotics in seismic acquisition activities will significantly reduce costs and importantly, minimise human intervention and consequently, HSE risk.
The ultimate ambition of these systems is to automate nodal seafloor acquisition operations so that they will eventually match wide-azimuth towed streamer costs and turnaround times, while at the same time retaining the technical advantages of the OBN systems. An ambitious goal perhaps, but maybe not an impossible one.
The Pioneers
In this brave new world of autonomous nodes, there are currently few players. An early entrant was UK-based Autonomous Robotics (ARL). They are developing technology that they hope will allow the safe deployment and recovery of over 1,200 underwater ‘Flying Nodes’ in 24 hours and be operable up to sea state 5. Their nodes will have a depth rating of up to 3,000m and are being designed to allow a seabed ‘loiter’ period of up to 12 months with a maximum seabed seismic recording time of 60 days. ARL was awarded a grant in April from the Oil and Gas Technology Centre (OGTC ) and two European energy companies to develop a bespoke seismic sensor to fit in the company’s ‘flying’ nodes and limited sea trials have been conducted off the UK’s south coast. In 2022 they are expecting to deploy 5–10 preproduction nodes in further sea trials.

ARL ‘Flying’ Node. © Autonomous Robotics Ltd.

Proposed BOSS Autonomous OBN. © Blue Ocean Seismic Services (BOSS).
Another project is a joint venture between Saudi Aramco and Fugro’s subsidiary Seabed Geosolutions which has been developing an autonomous OBN system called ‘SpiceRack’. Saudi Aramco won the Best Exploration Technology Award at the 2018 World Oil Awards for this system and the technology appears to have successfully conducted limited prototype AUV sea trials in the Arabian Gulf in 2017. PXGEO Seismic Services Limited recently announced a binding agreement with Fugro to acquire certain assets of their OBN business, with the transaction expected to complete mid-2021. What this means for the SpiceRack project though, is currently unclear.
Another of the more recent entrants is Blue Ocean Seismic Services (BOSS), which was formed with Australia-based companies, Blue Ocean Monitoring and Woodside Petroleum, and joined in 2020 by BP Ventures as a key investor and co-venturer. BOSS has considerable experience of AUV operations and announced that it had successfully completed sea trials of it’s testbed ocean bottom seismic robotic vehicle (tOBSrV) in Australian waters in May this year. The next phase will be to construct and test 10+ ‘alpha’ prototypes, culminating in a seismic sea trial late in Q3, 2020 in the North Sea.
A Norwegian technology firm, iDROP, has a taken a different approach with its autonomous Oceanid nodes. This system is based on individual cylindrical sensor nodes that are free-fall deployed, using gravity and ballast shift for propulsion and position control. These land at specific pre-planned positions on the seabed and then release the ballast to return to the surface for data retrieval. In March 2021, the system was mobilised for a fjord test and the company plans two further industry-funded offshore pilot-demos later this summer. These will be to verify the data quality uplift using low frequency geophones and to test the operational efficiency.
iDROP Oceanid Node. © iDROP AS.
All these companies envisage fully containerised, scalable, and modular solutions, deployable from vessels of opportunity, enabling efficient and cost-effective mobilisation to survey locations. They are also developing similar solutions, often adopting and modifying technologies from other industries as well as developing new ones. With the creation of new intellectual property (IP) comes the defence of competitive advantage. There has been regular patent litigation in the seismic equipment world and this will be another area of intense activity and scrutiny, with developers keen to stay one step ahead of the competition by protecting IP advantages.
Disruptive Engineering
The technical challenges for these pioneers remain substantial and are predominantly engineering related. Battery size and endurance, command-and-control and the launch and recovery systems are all significant hurdles to overcome, but all of these should ultimately be addressable within moderate timeframes. Another significant challenge in the implementation of autonomous operations is the currently limited communication capabilities between robotic units. For fully autonomous, robotic OBN systems to work, it is imperative that these systems communicate seamlessly to unlock their true value. The implementation of such communication systems is both complex and costly and will involve collaboration across several different industries. Lastly, and perhaps most importantly, for these systems to be used for larger scale exploration seismic programmes, the key is reducing the unit cost of the autonomous nodes, so that eventually 100,000+ units are deployed in a single survey.
When the Covid-19 pandemic and economic downturn is finally past us, oil and gas operators and service companies will have to continue exploring new avenues for cost reductions to be better equipped to withstand future market declines. Rystad Energy, in a report that investigated the adoption of robotics across the petroleum industry, found that existing solutions could replace hundreds of thousands of oil and gas jobs globally and reduce labour costs by several billion dollars by 2030, but only if the industry aggressively adopts robotics. If these robotic systems develop quickly enough, they could be highly disruptive in the seismic space and as we have seen in the airborne drone world, the technology can move at a frightening pace.