The availability of large 3D seismic surveys (i.e., greater than 10,000 km2) offers unprecedented and challenging opportunities for multi-scale seismic characterization as they are likely to sample a representative amount of various tectono-stratigraphic features from different tectonic events. While manual and semi-automated structural interpretation of large seismic datasets is a very time-consuming task, often leading to a simplified fault model, a geology-driven, machine-learning workflow can significantly improve the turnaround time and accuracy of seismic fault mapping and characterization. We successfully applied this novel workflow on a 20,000 km2 seismic survey with depths up to 10 km, capturing a variety of fault signatures, seismic signal-to-noise ratios, and frequencies (data courtesy of CGG and OMV Norge). Our approach enables the 3D fault interpretation process to be performed in a matter of hours compared to days while being geologically and mechanically realistic (Figure 1).
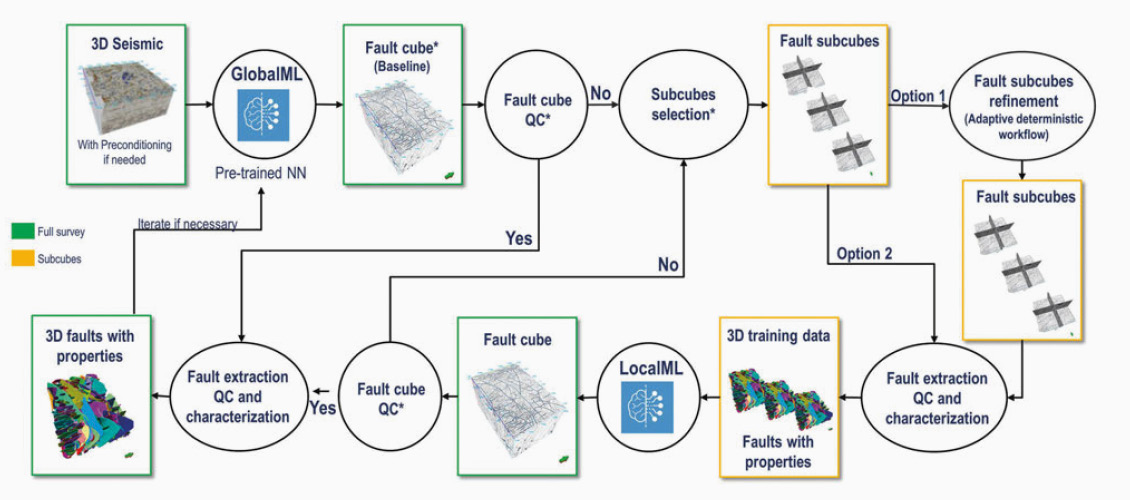
Figure 1: Tectonic framework workfl ow associated with ML (global and local) assisted structural interpretation. Note: Quality control and selection based on domain knowledge from literature and geodynamics. The sub-cubes should capture the diversity of the main fault seismic signatures. Credit: Schlumberger.
Generating a Fault Baseline Map with a Convolutional Neural Network
Machine learning (ML) is the study of computer algorithms that improve automatically through experience and using data and is considered a part of artificial intelligence. ML algorithms build a model based on sample data, known as ‘training data’, to make predictions or decisions without being explicitly programmed to do so. The proposed approach combines two training strategies of a 3D convolutional neural network (CNN): a ‘global’ scheme based on the generation of thousands of synthetic seismic volumes with labeled faults and a ‘local’ scheme trained using fit-for-basin, high-resolution 3D fault labels generated using automated deterministic solutions. The full workflow covers data audit; prediction of a first fault framework (baseline) by applying a 3D CNN trained on synthetic data; baseline quality assessment and identification of missing structures; baseline refinement by retraining locally the 3D CNN; structural analysis of the predicted faulting pattern; and fault network classification based on relative timing of faulting.
First, we collect and integrate geological knowledge to allow for the assessment of the seismic data quality in the area of interest, in this case the North Sea. The North Sea rift system is characterized by a variety of faulting patterns in terms of geometry and size cutting through the thinned crust. The rift system is interpreted to have migrated northward since its initiation in the Late Permian – Early Triassic period (Phillips et al., 2019). In this study, the area of interest captures three main tectonic events with a given stress regime for each one. Firstly, a rifting phase one in Late Permian – Early Triassic with N–S striking faults and reactivation of Devonian shear zones. Secondly, a rifting phase two in Late Jurassic – Early Cretaceous with NE–SW striking faults and lastly a Late – syn to post rifting phase with N–S striking faults.
To address the 3D multi-scale faulting patterns and to optimize the dataflow pipeline for machine learning, we use a laterally equally sampled (50 × 50 meters) seismic volume with a vertical sampling of 20 meters. Then, we deploy a ‘global’ 3D CNN over the full survey (Wu et al., 2019, Sarajærvi et al., 2020) to obtain a baseline map of the fault network. The training is based on a collection of 6,000 synthetic seismic volumes (128 × 128 × 128 samples) with various resolutions and signal-to-noise ratios that contain labeled faults. We evaluate the baseline and validate the consistency and completeness of the predicted fault traces in 3D over the full survey focusing on fault termination, connectivity, and continuity. This way, structures not completely detected or missing in 3D are identified to be further improved in the next steps of the workflow. Then, we adopt a fit-for-basin approach aiming for a local enhancement of the fault network map. The enhancement is performed using deterministic solutions in selected sub-areas capturing the region’s main fault signatures, from which, and when needed, 3D labeled training data are generated to retrain the 3D CNN (Figure 1).
Quality Assessment of the Global Machine Learning Baseline
The primary goal of the proposed iterative ML approach is to honor the geological context and principles, while capturing the local tectonic variability with a high level of detail and in 3D. To achieve this level of accuracy and to ensure that geological rules are respected, we consider key structural mapping concepts where the domain expert has a major role to steer and validate in the sub-areas. These include the type and location of the detected seismic discontinuities, the seismic horizons displacement along the discontinuities, the relationship between the detected discontinuities, and the 3D consistency of the fault geometry.
In the sub-areas, we optionally combine the baseline map with a set of advanced seismic attributes (Figure 1, option 1). For example, first, an amplitude-based approach with edge detection attributes can improve the continuity and connectivity of the fault network (Etchebes et al., 2019). And second, the strata indicator that can highlight stratified from unstratified chaotic areas. Defining contrasts may be used to identify structural discontinuities such as low-angle fault planes (Bounaim et al., 2019). If the baseline map does not require local improvement, then we proceed with option 2 (Figure 1).
Improving the Fault Map by Retraining the 3D CNN Locally
At this stage of the workflow, we proceed with a structural analysis that consists of a detailed study of the seismic signature across the mapped discontinuities. From our fault sub-cubes, structural properties such as fault azimuth, dip angle and planarity indicator are computed in a set of property volumes (Figure 1). These properties are used to assist the geoscientist in the structural interpretation as well as to condition the input fault volume for the subsequent fault extraction. Faults are extracted as point sets at the seismic resolution (Bounaim et al., 2013; Etchebes et al., 2019). Thereafter, the extracted and verified faults are transferred into triangulated meshes to obtain closed planes. These fault planes are then populated into labeled fault cubes and used as training data in the local 3D CNN (Figure 1). Subsequently, we run the trained network over the full survey. Finally, we validate the predicted faulting pattern by combining the refined set of structural properties with the strata indicator vector attribute map over the full survey (Figures 2 and 3).
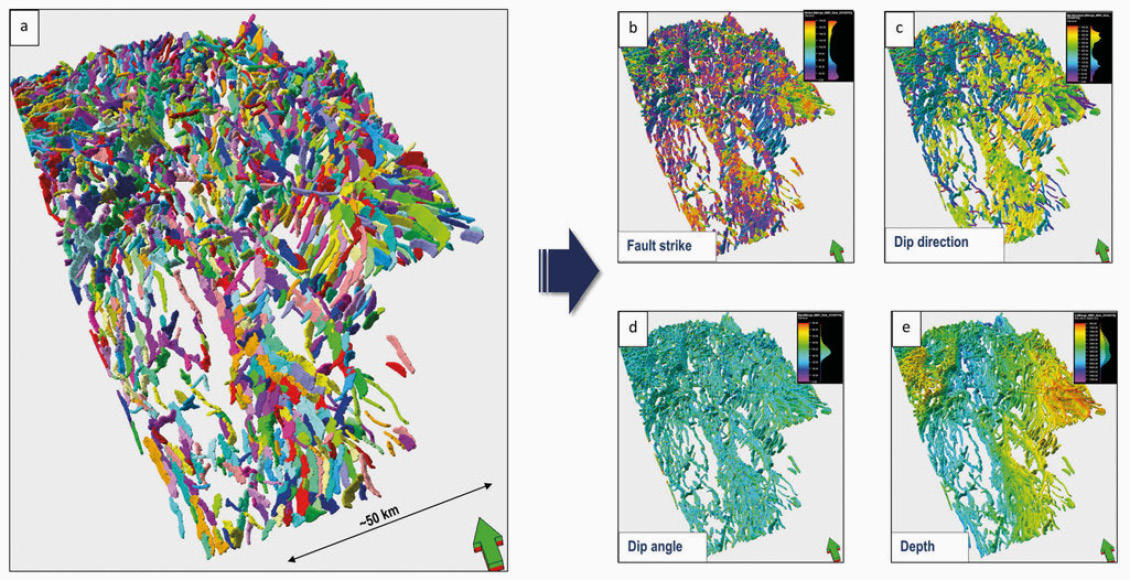
Figure 2: Object-based structural analysis applied on the full survey. (a) Extracted fault point sets, (b), (c), (d) and (e) are fault strike (in degrees), dip direction (in degrees), dip angle (in degrees) and depth (in meters) properties, respectively, mapped on the extracted fault point sets. Credit: Schlumberger.
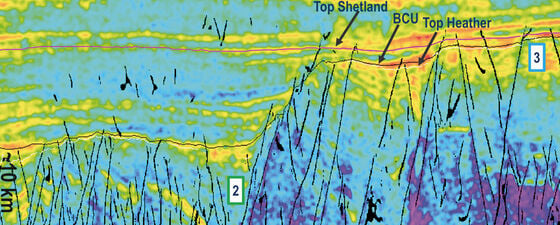
The fault network map resulting from our workflow can be then used as an input for various applications. One of them is the paleo and present-day stress analysis which consists of combining the fault network analysis with stratigraphy sequence boundary analysis, enabling the classification of faults following their relative timing (Figure 3). The latter provides an indication of the evolution of the stress regime through time. The understanding of the paleo-stress regime and the present-day maximum horizontal stress (SHmax) direction can help to assess the potential conductivity of faults under a particular SHmax, as the strike azimuth of conductive faults should coincide with the direction of SHmax.
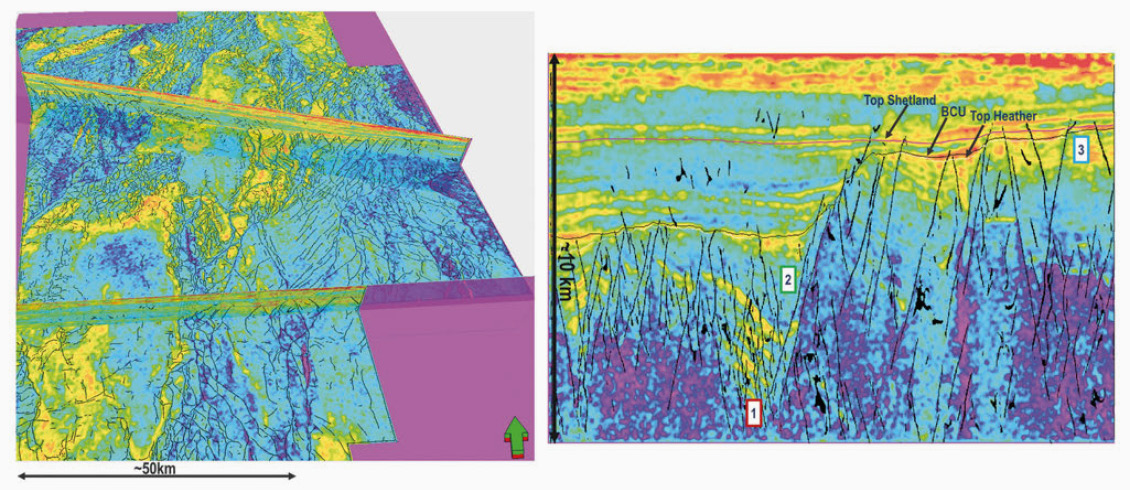
Figure 3: Fault map and strata indicator vector attribute combined for a relative timing of faulting analysis (on the left side) and cross-section (on the right) where relative timing of faulting is established based on their structural relation (1-oldest, 2 and 3-youngest) and the use of typical horizons (BCU, top Heather and top Shetland). Credit: Schlumberger.
In summary, the combination of ML, deterministic methods and domain knowledge applied to seismic structural interpretation increased the confidence in detecting geologically sound faulting patterns from seismic. Structural interpretation of large surveys by selecting key smaller areas of interest, and ideally capturing the main regional faulting patterns, is an appropriate starting point to ensure that the 3D CNN training is as representative as possible. Our approach of validating the consistency of the detected faulting patterns through analysis of automatically extracted structural properties (azimuth, dip, planarity, depth) and selected seismic tectono-stratigraphic attributes is unique and allows the application of a time-efficient fit-for-purpose approach on a very large-scale survey.
Acknowledgments
This study was part of a joint-research collaboration between Schlumberger and OMV Norge. A number of colleagues from both organizations contributed to this study.
Schlumberger co-authors: Marie Etchebes, Michael Nickel, Bartosz Goledowski, Wiebke Athmer, Pierre Le Guern, Trond Hellem Bø, Bjørn Harald Fotland, Aicha Bounaim, Martin Haege, Oddgeir Gramstad, Geir Vaaland Dahl, Martin Sarajaervi, Bent Audun Tjostheim.
OMV Norge co-authors: John Reidar Granli, Olivier Point, Alexandra Makrygiannis, Thomas Melgaard.
The authors would like to thank both companies for the permission to publish the results of this collaborative work. The authors also thank OMV Norge and CGG for the permission to use the data to create the figures.
References
Bounaim, A., Bø, T.H., Athmer, W., Sonneland, L. and Knoth, O. 2013. Large Fault Extraction Using Point Cloud Approach to a Seismic Enhanced Discontinuity Cube. Extended Abstracts, 75th EAGE Conference and Exhibition, London, UK.
Bounaim, A., Etchebes, M., Haukas, J., Borgos, H., Fotland, B.H. and Sonneland, L. 2019, September 25. Vector attributes: A family of advanced seismic attributes to assist in geological interpretation. Society of Exploration Geophysicists Technical Program Expanded Abstracts, pp.1813–1817.
Etchebes, M., Bounaim, A., Brenna, T. and Steckhan, D. 2019. Fault Characterization Using Advanced Seismic Interpretation Techniques–Quantitative Input for Optimal Well Placement in Structurally Complex Reservoirs. Conference Proceedings, 81st EAGE Conference and Exhibition 2019, London, UK.
Phillips, T., Fazlikhani, H., Gawthorpe, R., Fossen, H., Jackson, C., Bell, R., Faleide, J.I. and Rotevatn, A. 2019. The Influence of Structural Inheritance and Multiphase Extension on Rift Development, the Northern North Sea. Tectonics, 38(12), 4099–4126, doi:10.1029/2019TC005756.
Sarajærvi, M., Hellem Bø, T., Goledowski, B. and Nickel, M. 2020. Robust Evaluation of Fault Prediction Results: Machine Learning Using Synthetic Seismic. First EAGE Digitalization Conference and Exhibition.
Wu, X., Liang, L., Shi, Y. and Fomel, S. 2019. FaultSeg3D: Using synthetic data sets to train an end-to-end convolutional neural network for 3D seismic fault segmentation. Geophysics, 84, IM35–IM45.